DropBot is an open-source Digital Microfluidic (DMF) automation system developed in the Wheeler Lab. It can be used to manipulate discrete droplets on the surface of an array of electrodes coated with a hydrophobic insulator. DMF has many applications in the fields of biology and chemistry, including diagnostics, cell-based assays, and chemical synthesis. The DropBot features a modular and extensible design, an intuitive user interface, and is capable of driving up to 120 independent channels. It also provides dynamic impedance sensing which enables closed-loop control and real-time measurement of:
- drop position
- instantaneous drop velocity
- electrostatic driving force
Check out the Wheeler Lab’s recent entry in NSERC’s Science Action video competition.
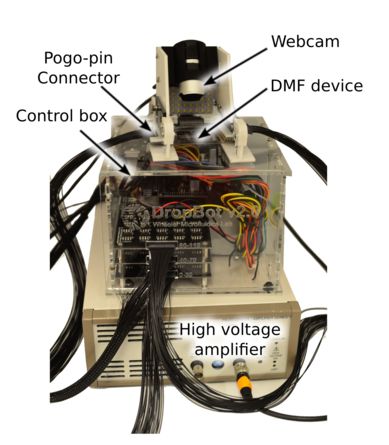
System overview
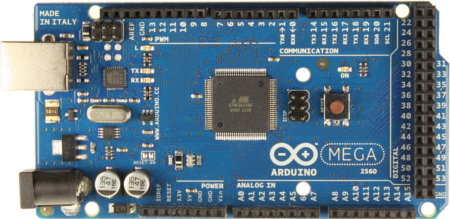
DropBot is built around an Arduino-based instrument and is controlled by a custom software interface called Microdrop. Users can activate/deactivate electrodes on the DMF device by clicking their mouse on the webcam video overlay, providing an intuitive interface with real-time visual feedback. Sequences of actuation steps can be pre-programmed and run automatically, enabling fully automated operation. The system is designed as a loosely-coupled set of modules, which means that it is relatively easy to extend the hardware and/or software capabilities.
Open-source
All components are open-source, subject to the GPL (software code) or Creative Commons Attribution-ShareAlike licence (hardware designs), meaning you are free to make your own.
![]()
Get involved
For more information or to request community DropBot support, please join the forum. For announcements concerning future releases/updates, sign up for the DropBot announce mailing list.

Videos
Real-time control and velocity measurements
Demonstration of real-time drop control and protocol programming. This video also highlights the systems ability to measure drop velocity from electrical impedance.
Automated protocol with video overlay
Video showing an automated protocol with drop dispensing, merging, mixing and splitting.
Software
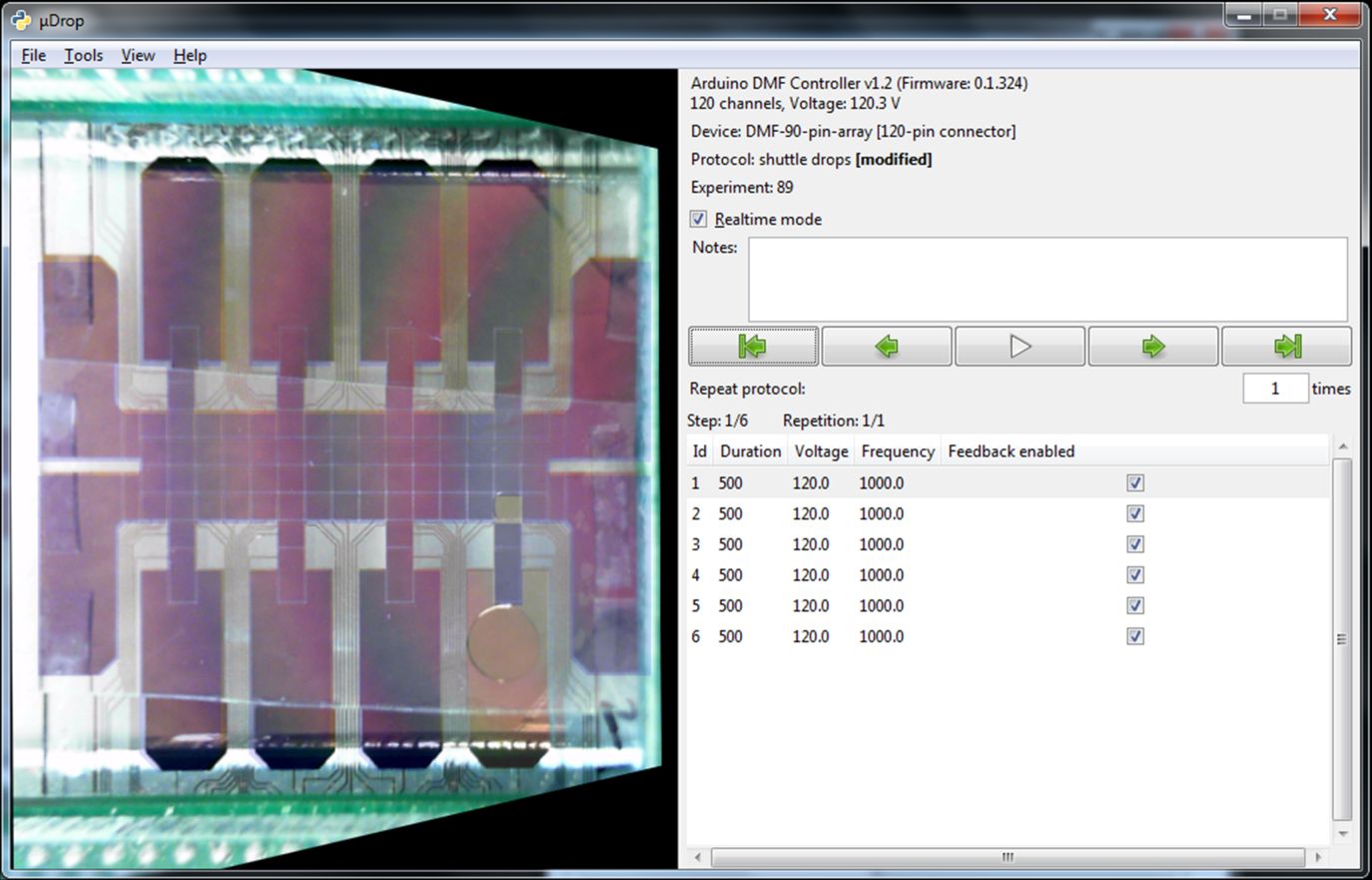
Microdrop software
Microdrop is the graphical user interface for the DropBot DMF automation system.
Hardware
All hardware designs can be viewed or edited using KiCAD or Sketchup.
Control board
.jpg)
Signal generator board
.jpg)
High-voltage switching board
.jpg)
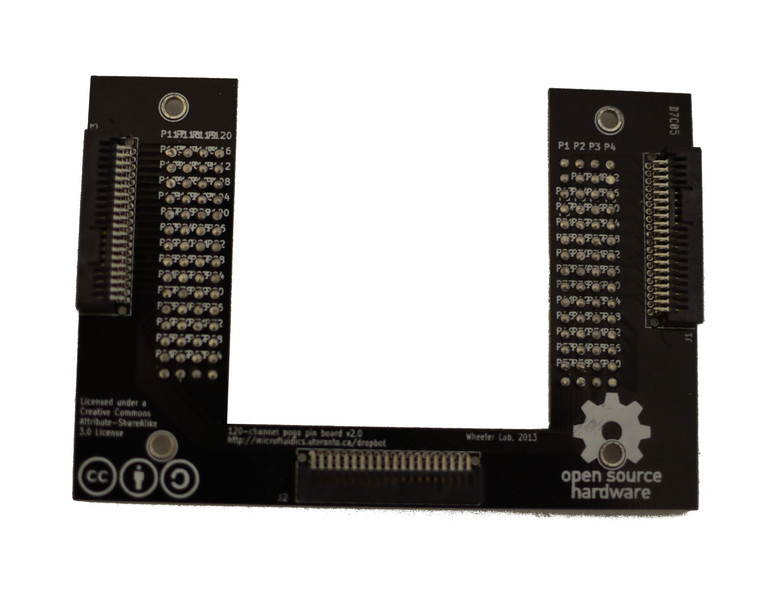
Pogo pin connector board
Device connector

DropBot case

DropBots in the wild
Here’s a map of all of the known DropBot systems out there (both up and running and those being built). If you are building a system, add a wiki page or link to another webpage/blog here to document your progress. Email ryan[dot]fobel[at]utoronto[dot]ca if you want to add a pin to the map.