 We just pushed up the v2.1 hardware designs to the git server. You can find instructions for ordering PCBs and a zip file containing all of the KiCAD, and gerber files on the wiki.
We just pushed up the v2.1 hardware designs to the git server. You can find instructions for ordering PCBs and a zip file containing all of the KiCAD, and gerber files on the wiki.
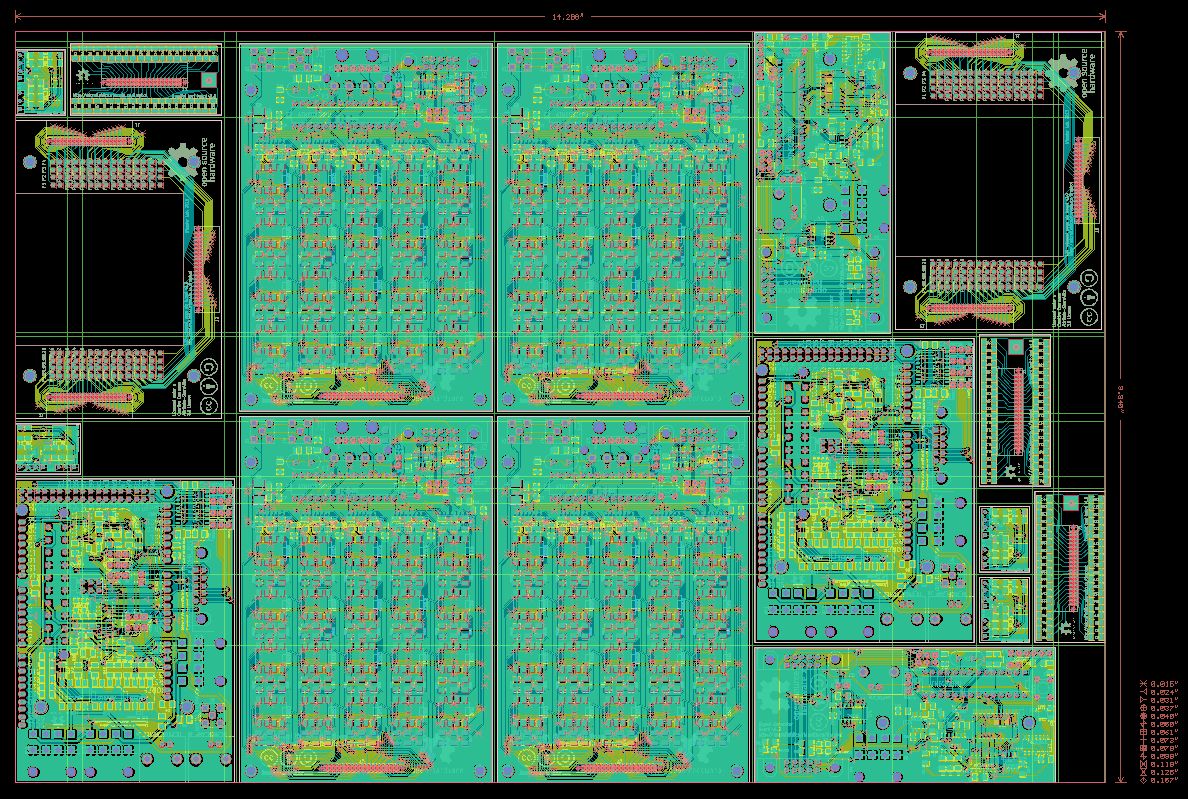
This new design is a minor update to the v2.0 series. The biggest changes are:
- The new high-voltage switching boards are 2-layer (previously they were 4-layer). This means that they are cheaper to fabricate and can now be ordered on a single panel with the rest of the PCBs.
- The new high-voltage switching boards have their own microcontroller. Previously they used a general purpose input output (GPIO) chip, which was one of the most difficult chips in the system to solder because it was so tiny! In the future, having a microcontroller on these boards will make it possible to add new functionality.
- All surface mount capacitors/resistors now have a minimum size of 1206 (previously, some of the capacitors were much smaller and more difficult to solder manually).
- All of the boards now have hardware support for in-system programming (meaning that in the future, it will be possible to flash the firmware for all of the microcontrollers over a single USB cable automatically).
If you have any questions/comments, post them to the dev list. If anyone gets boards assembled using the stencil reference numbers, let us know; we’re curious to see how that works out.
7 Comments